
Page 116 - 2023年第54卷第6期
P. 116
高频振荡模式的阻尼比均大于 0,表明水电站系统是稳定的。此外,对于耦合振荡域的调速器参数点
(如 B和 B),低频振荡模式对应的特征值实部的绝对值远远小于高频振荡模式的实部的绝对值,表
2 3
明其更靠近虚轴,因此低频振荡模式为系统的主导振荡模式。
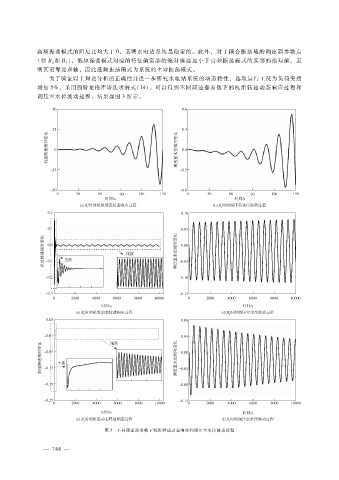
为了验证以上理论分析的正确性并进一步研究水电站系统的动态特性,选取运行工况为负荷突然
增加 5%,采用四阶龙格库塔法求解式(14),可以得到不同调速器参数下的机组转速动态响应过程和
调压室水位波动过程,结果如图 3所示。
图 3 不同调速器参数下机组转速动态响应和调压室水位波动过程
4
— 7 4 —