
Page 117 - 2023年第54卷第6期
P. 117
根据图 3(a)和图 3(b)可知,对于调速器参数点 B,当系统受到扰动后,机组转速动态响应过程
1
和调压室水位波动的发散速度较快,振荡周期很短,约为 17.5s,根据公式 ω = 2 π ?T换算成角频率为
0.3581rad?s,与表 2中的高频振荡模式相对应,因此系统失稳的根本原因是由于调速器参数取值过
小,导致调节速度过快,从而引起的 “压力管道 - 机组” 子系统失稳。由图 3(c)和图 3(e)可知,机
组转速动态响应过程有主波和尾波之分,其中主波收敛速度较快,周期较短,因此主波对应表 2中的
高频振荡模式,而尾波周期较长,因此尾波对应表 2中的低频振荡模式。由图 3(d)可知,对于调速器
参数点 B,调压室水位波动逐渐发散,且发散速度较慢,周期约为 551s,换算成角频率为 0.0114rad?s,
2
因此调压室水位波动的频率为表 2中的低频振荡模式的频率。由图 3(f)可知,对于调速器参数点 B,
3
调压室水位波动逐渐收敛,且周期约为 561s,换算成角频率为 0.0112rad?s,因此调压室水位波动的
频率对应了表 2中的低频振荡模式的频率。综上所述,以上运用四阶龙格库塔法求解系统动态响应过
程得到的结论与特征值分析法得到的结论完全一致。此外,当调速器参数在耦合振荡域内取值时(如
图 3中的调速器参数点 B和调速器参数点 B),水电站系统的稳定性和动态响应主要受低频振荡模式
2 3
的影响。
4 水电站系统耦合振荡机理
根据第 3节的分析可知,在耦合振荡域内系统的稳定
性由低频振荡模式决定。本节通过分析 “引水隧洞 - 调压
室” 子系统和 “压力管道- 机组” 子系统的幅频特性,开
展 “引水隧洞 - 调压室” 子系统和 “压力管道 - 机组” 子
系统耦合振荡机理的研究。
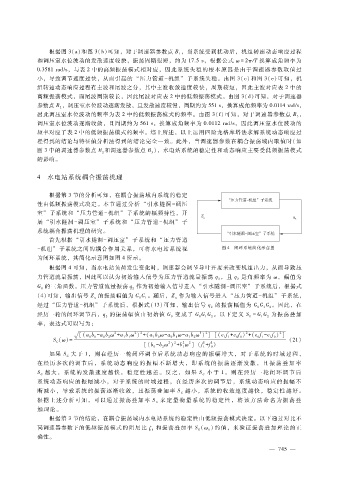
首先根据 “引水隧洞- 调压室” 子系统和 “压力管道
- 机组” 子系统之间的耦合作用关系,可将水电站系统视 图 4 闭环系统简化示意图
为闭环系统,其简化示意图如图 4所示。
根据图 4可知,当水电站负荷发生变化时,调速器会调节导叶开度来改变机组出力,从而导致压
力管道流量振荡,因此可以认为初始输入信号为压力管道流量振荡 q,且 q 是角频率为 ω ,幅值为
2 2
G 的三角函数。压力管道流量振荡 q 作为初始输入信号进入 “引水隧洞- 调压室” 子系统后,根据式
0
2
(4)可知,输出信号 Z 的振荡幅值为 GG。随后,Z 作为输入信号进入 “压力管道 - 机组” 子系统,
u 0 1 u
经过 “压力管道- 机组” 子系统后,根据式(13)可知,输出信号 q 的振荡幅值为 GGG。因此,在
0 1 2
2
经历一轮的闭环调节后,q 的振荡幅值由初始值 G 变成了 GGG。以下定义 S = GG 为振荡叠加
2 0 0 1 2 G 1 2
率,表达式可以写为:
2
2 2
2
2
3 2
槡 [(ab- abω + abω)+ (abω - abω - abω)] [(ef + ef)+ (ef - ef)]
1 1
1 2
1 0
0 2
1 0
0 1
0 0
0 1
0 0
1 1
S( ω ) = (21)
G
2
2
2
2
2 2
[( b- bω)+ bω] (f + f)
0
1
2
0
1
如果 S 大于 1,则在经历一轮闭环调节后系统 动 态 响 应 的 振 幅 增 大, 对 于 系 统 的 时 域 过 程,
G
在经历多次的调节 后, 系 统 动 态 响 应 的 振 幅 不 断 增 大, 即 系 统 的 振 荡 逐 渐 发 散, 且 振 荡 叠 加 率
S 越大,系统的发散速度越 快, 稳 定 性 越 差。 反 之, 如 果 S 小 于 1, 则 在 经 历 一 轮 闭 环 调 节 后
G
G
系统动态响应的振幅减小,对于系统的时域过程,在经历多次的调节后,系统动态响应的振幅 不
断减小,导致系统的振荡逐渐收敛,且振荡叠加率 S 越小,系统的收敛速度越快,稳定 性 越 好。
G
根据上述分析可知,可以通过振荡叠加率 S 来 定 量 衡 量 系 统 的 稳 定 性, 将 该 方 法 命 名 为 振 荡 叠
G
加理论。
根据第 3节的结论,在耦合振荡域内水电站系统的稳定性由低频振荡模式决定。以下通过对比不
)的值,来验证振荡叠加理论的正
同调速器参数下的低频振荡模式的阻尼比 ζ b 和振荡叠加率 S( ω b
G
确性。
— 7 4 5 —