
Page 99 - 2022年第53卷第4期
P. 99
测水位值修正,因此一般在控制算法设计中将A 和τ 设为定值 [20] 。这种处理方法没有考虑明渠的非线
d d
性水力特性,使得在明渠水位或输水流量变幅较大的情况下预测控制模型的预测精度降低,无法保
证模型生成的实时调控方案为最优方案;但是由于在预测控制模型中,被控对象只执行控制策略中
对应于面临时刻的调控指令,而此调控指令是根据实时状态及第一步的预测结果制定的,具有较高
的可靠性,因此控制模型仍能实现较好的控制效果;相关研究也表明,选取多个工况下相对较小的
参数A 和相对较大的τ 能显著提高控制模型的鲁棒性 [21] 。
d d
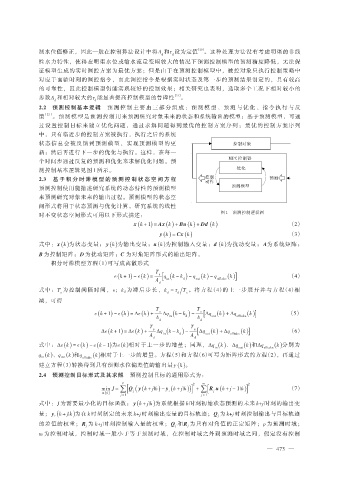
2.2 预测控制基本逻辑 预 测 控 制 主 要 由 三 部 分 组 成 : 预 测 模 型 、 预 测 与 优 化 、 指 令 执 行 与 反
馈 [22] 。预测模型是预测控制用来预测研究对象未来的状态和系统输出的模型;基于预测模型,可通
过设置控制目标来建立优化问题,通过求解问题得到最优的控制方案序列;最优的控制方案序列
中,只有临近步的控制方案被执行,执行之后的系统
状态信息会被反馈到预测模型,实现预测模型的更 控制对象
新;然后再进行下一步的优化与执行。这样,在每一
MPC 控制器
个时间步通过反复的预测和优化来求解优化问题。预
测控制基本逻辑见图 1 所示。 优化
2.3 基 于 积 分 时 滞 模 型 的 预 测 控 制 状 态 空 间 方 程 控制 预测
动作
预测控制使用能描述研究系统的动态特性的预测模型 预测模型
来预测研究对象未来的输出过程。预测模型的状态空
间形式将用于状态预测与优化计算。研究系统的线性
时不变状态空间形式可用以下形式描述: 图 1 预测控制逻辑图
)
x (k + 1 = Ax ( ) k + Bu ( ) k + Dd ( ) k (2)
y ( ) k = Cx ( ) k (3)
式中:x ( ) k 为状态变量; y ( ) k 为输出变量;u ( ) k 为控制输入变量;d ( ) k 为扰动变量; A为系统矩阵;
B 为控制矩阵;D 为扰动矩阵;C 为对角矩阵形式的输出矩阵。
积分时滞模型方程(1)可写成离散形式
T
)
e (k + 1 - e ( ) k = [ q (k - k ) - q ( ) k - q ( ] ) k (4)
s
A in d out offtake
d
式中:T 为控制间隔时间,s;k d 为滞后步长,k = τ T 。将方程(4)的上一步展开并与方程(4)相
s d d s
减,可得
T T
)
e (k + 1 - e ( ) k = De ( ) k + s Dq (k - k ) - s [Dq ( ) k + Dq ( ] ) k (5)
A in d A out offtake
d d
T T
)
De (k + 1 = De ( ) k + s Dq (k - k ) - s [Dq ( ) k + Dq ( ] ) k (6)
A in d A out offtake
d d
式中:De ( ) k = e ( ) k - e (k - 1 )为e ( ) k 相对于上一步的增量;同理,Dq ( ) k 、Dq ( ) k 和Dq ( ) k 分别为
in out offtake
q in ( ) k 、q out ( ) k 和q ( ) k 相对于上一步的增量。方程(5)和方程(6)可写为矩阵形式的方程(2),再通过
offtake
建立方程(3)转换得到只有预测水位偏差值的输出量 y ( ) k 。
2.4 预测控制目标形式及其求解 预测控制目标的通用形式为:
p 2 m 2
)
min J = å[ Q ( y (k + j|k - y (k + j|k ] ) ) + å[ R u (k + j - 1|k ] ) (7)
u ( ) k j r j
j = 1 j = 1
式中:J 为需要最小化的目标函数; y(k + j|k )为系统根据 k 时刻初始状态预测的未来 k+j 时刻的输出变
量; y r (k + j|k )为在 k 时刻制定的未来 k+j 时刻输出变量的目标轨迹;Q j 为 k+j 时刻控制输出与目标轨迹
的差值的权重;R j 为 k+j 时刻控制输入量的权重;Q j 和R j 为只有对角值的正定矩阵;p 为预测时域;
m 为控制时域,控制时域一般小于等于预测时域,在控制时域之外到预测时域之间,假定没有控制
— 473 —