
Page 89 - 2022年第53卷第12期
P. 89
元个数 N 。
max
(3)设置搜索横向分枝数 n:在搜索失效路径的过程中,对每一个单元都进行横向分枝,才不会
b
遗漏主要失效模式。这样操作效率较低,且横向分枝搜索出的大量失效路径形成的失效模式可能对整
个体系的可靠度贡献不大,往往可以忽略。引入横向分枝数 n,可以提高失效模式搜索效率。对于重
b
力坝而言,其静力工况下的失效路径往往是沿着薄弱环节发展的,可以近似地假设 n= 1 。
b
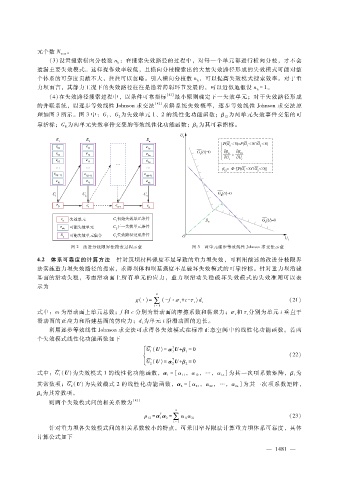
( 4)在失效路径搜索过程中,以条件可靠指标 [41] 最小原则确定下一失效单元;对于失效路径形成
的并联系统,以逐步等效线性 Johnson求交法 [42] 求解系统失效概率,逐步等效线性 Johnson求交法原
理如图 3所示。图 3中: 珔 G为失效单元 1、2的线性化功能函数;β 12 为两单元失效事件交集的可
G、 珔
2
1
G 为其可靠指标。
靠指标; 珔 为两单元失效事件交集的等效线性化功能函数;β E
E
图 2 改进分枝限界法搜索过程示意 图 3 两单元逐步等效线性 Johnson求交法示意
4.2 体系可靠度的计算方法 针对筑坝材料强度不足导致的重力坝失效,可利用前述的改进分枝限界
法实施重力坝失效路径的搜索,求得坝体和坝基强度不足破坏失效模式的可靠指标。针对重力坝沿建
基面的滑动失稳,考虑滑动面上所有单元的应力,重力坝滑动失稳破坏失效模式的失效准则可以表
示为
m
g(·) = ∑ ( - f·σ i + c - τ i )d i (21)
i =1
分别为单元 i垂直于
式中:m为滑动面上单元总数;f和 c分别为滑动面的摩擦系数和黏聚力;σ i 和 τ i
滑动面的正应力和沿建基面的剪应力;d为单元 i沿滑动面的边长。
i
利用逐步等效线性 Johnson求交法可求得各失效模式在标准正态空间中的线性化功能函数。若两
个失效模式线性化功能函数如下
) T = 0
{ G(U) = α 1 U + β 1 (22)
1
)
T
G(U) = α 2 U + β 2 = 0
2
)
,
式中:G(U)为失效模式 1的线性化功能函数,α 1 = [ α 11 α 12 ,…,α 1n ]为其一次项系数矩阵,β 1 为
1
)
,
其常数项;G(U)为失效模式 2的线性化功能函数,α 2 = [ α 21 α 22 ,…,α 2n ]为其一次项系数矩阵,
2
为其常数项。
β 2
则两个失效模式间的相关系数为 [42]
n
T
ρ 12 α 1 α 2 ∑ α 1i α 2i (23)
=
=
i =1
针对重力坝各失效模式间的相关系数较小的特点,可采用窄界限法计算重力坝体系可靠度,具体
计算公式如下
4
— 1 8 1 —