
Page 111 - 2023年第54卷第2期
P. 111
式(18)可应用二次规划方法求解,由此导出的模型预测控制(MPC)考虑了未来一段时间内的已知扰动
作用,即增加了前馈控制环节并与反馈控制相耦合,求解预测时域内的最优解,一般情况下控制性能
较 LQ更优。然而,当式(15)的预测偏差较大时,控制性能难以保障,有时甚至会低于 LQ控制。
系统控制模型的准确性对控制效果至关重要,然而积分时滞模型应用于灌区输配水系统时,存在
以下不足:( 1)不适于大型灌区沿程多取水口的情形。我国大型灌区渠道两岸分布多个取水斗口,侧
向取水干扰水流状态,回水区以上的沿程水深往往会随取水流量的变化而变化,导致 ID模型的均匀
流假定失效。不仅如此,当渠道流量较大底坡较缓时,渠池均匀流区和回水区不再明显,ID模型适用
性欠佳 [26] 。(2)适用工况范围较窄。ID模型是圣维南方程在设计工况附近的线性化近似,当流量、水
深变化幅度较大时,模型误差显著增加,而灌区实际运行时高、中、低水位交替,ID模型对此适应性
较差。除此以外,ID模型仅考虑了回水区的蓄水量变化,当工况变化较为显著时,回水区以上渠段的
蓄水量变化不能忽略,其对下游节制闸闸前水位也有显著影响。( 3)参数推算方法可靠性不足。ID模
型的两个主要参数为回水区面积和迟滞时间,通常有两种方法可以获得,一是估算公式,二是阶跃实
验,前者所基于的水平面假设往往不符合实际系统,准确性比较有限,后者则因成本过高,在实地应
用中无法实现,而从模拟模型阶跃实验获得的参数与实际系统往往存在偏差,同样地,推算所得参数
基本只适用于设定的工况,当灌区运行的流量、水位变化较大时,参数可靠性基本失效。
3 分段积分时滞模型
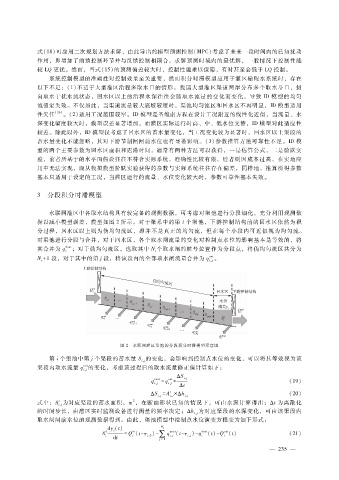
水联网灌区中各取水结构具有较完备的观测数据,可考虑对渠池进行分段细化,充分利用观测数
据以减小模型误差,模型如图 2所示。对于渠系中的第 i个渠池,下游控制结构前的回水区依然为积
分过程,回水区以上则为伪均匀流区,即并不是真正的均匀流,但在每个小段内可近似视为均匀流。
对渠池进行分段与合并,对于回水区,各个取水闸流量的变化对控制点水位的影响基本是等效的,将
dout
其合并为 q ;对于伪均匀流区,选取其中 N个取水闸的桩号位置作为分段点,将伪均匀流区共分为
i i
out
N+ 1段,对于其中的第 j段,将该段内的全部取水闸流量合并为 q 。
i,j
i
图 2 水联网灌区渠池的分段积分时滞模型示意图
第 i个渠池中第 j个渠段的蓄水量 S 的变化,会影响到控制点水位的变化,可以将其等效视为该
i,j
out
渠段内取水流量 q 的变化,考虑该过程后的取水流量修正值计算如下:
i,j
Δ S i,j
xout
out
q = q + (19)
i,j i,j
Δ t
s
Δ S = A × Δ h (20)
i,j
i ,j
i,j
s
2
式中:A 为对应渠段的蓄水面积,m ,在断面形状已知的情况下,可由水深计算得出;Δ t为离散化
i ,j
的时间步长,由灌区实时监测设备进行测量的频率决定;Δ h 为对应渠段的水深变化,可由该渠段内
i,j
取水闸闸前水位的观测数据得到。由此,渠池模型中控制点水位演变方程变为如下形式:
dy(t) N i
i
out
dout
in
xout
) -
A b = Q (t - τ i,0 ∑ q (t - τ i,j ) - q (t) - Q (t) (21)
i
i
i
i,j
i
dt j =1
— 2 3 5 —