
Page 115 - 2023年第54卷第2期
P. 115
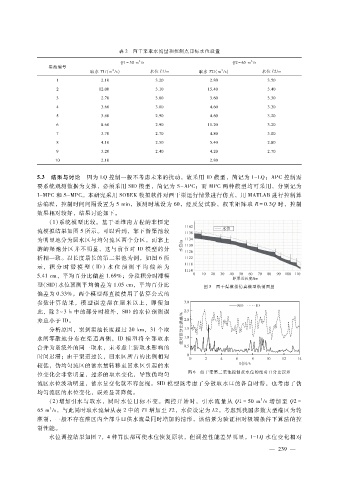
表 2 西干渠取水流量和控制点目标水位设置
3
3
Q1 = 50m ?s Q2 = 65m ?s
渠池编号
3 3
取水 T1?(m ?s) 水位 L1?m 取水 T2?(m ?s) 水位 L2?m
1 2.10 3.20 2.80 3.50
2 12.00 3.10 15.40 3.40
3 2.70 3.00 3.60 3.30
4 3.60 3.00 4.60 3.30
5 3.60 2.90 4.60 3.20
6 8.60 2.90 11.20 3.20
7 3.70 2.70 4.80 3.00
8 4.10 2.50 5.40 2.80
9 3.20 2.40 4.20 2.70
10 2.10 2.80
5.3 结果与讨论 因为 LQ控制一般不考虑未来的扰动,故采用 ID模型,简记为 I - LQ;APC控制需
要系统观测数据为支撑,必须采用 SID模型,简记为 S - APC;而 MPC两种模型均可采用,分别记为
I - MPC和 S - MPC。本研究采用 SOBEK模拟软件对西干渠运行情景进行仿真,用 MATLAB进行控制算
法编程,控制时间间隔设置为 5min,预测时域设为 60,经反复试验,权重矩阵取 R = 0.3 Q时,控制
效果相对较好,结果讨论如下。
(1)系统模型比较。基于圣维南方程的非恒定
流模拟结果如图 5所示。可以看到,靠下游渠池较
为明显地分为回水区与均匀流区两个分区,而靠上
游的渠池分区并不明显,这与前节对 ID模型的分
析相一致。以长度最长的第二渠池为例,如图 6所
示,积 分 时 滞 模 型 (ID)水 位 预 测 平 均 偏 差 为
5.41cm,平均百分比偏差 1.69%;分段积分时滞模
型(SID)水位预测平均偏差为 1.05cm,平均百分比
图 5 西干渠模拟仿真模型纵剖面图
偏差为 0.33%。两个模型都直接使用了估算公式的
参数计 算 结 果,模 型 误 差 都 在 厘 米 以 上,即 便 如
此,除 2~3h中的部分时段外,SID的水位预测误
差总小于 ID。
分析原因,案例渠池长度超过 20km,31个取
水闸零散地分布在渠道两侧,ID模型 将全 部取水
合并为系统外的同一取水,未考虑上游取水影响的
时间迟滞;由于渠道过长,回水区所占的比例相对
较低,伪均匀流区的蓄水量转移至回水区引起的水
图 6 西干渠第二渠池控制点水位的绝对百分比误差
位变化会非常明显,过多的取水变化,导致伪均匀
流区水位波动明显,蓄水量变化就不容忽视。SID模型既考虑了分散取水口的各自时滞,也考虑了伪
均匀流区的水位变化,误差显著降低。
3
( 2)增加引水与取水,同时水位目标不变。调控开始时,引水 流量 从 Q1 = 50m ?s增 加至 Q2 =
3
65m ?s,与此同时取水流量从表 2中的 T1增加至 T2,水位设定为 L2。考虑到我国多数大型灌区为轮
灌制,一般不存在灌区内全部斗口供水流量同时增加的情形,该情景为验证相对极端条件下算法的控
制性能。
水位调控结果如图 7,4种算法都可使水位恢复原状,但调控性能差异明显。I - LQ水位变化相对
— 2 3 9 —