
Page 117 - 2023年第54卷第2期
P. 117
增加时,同时增加取水且抬升水位是违背水量平衡原理的,理论上不可能实现,实际运行一般是先增
3
加引水、抬高水位,然后陆续开始增加取水。在调控开始时刻,引水流量从 Q1 = 50m ?s增加至 Q2 =
3
65m ?s,同时,水位目标从 L1增加 L2,渠池 1的取水流量立刻从 T1增加至 T2,下游渠池的取水增
加则依次延迟 2h发生,逐个增加至 T2。
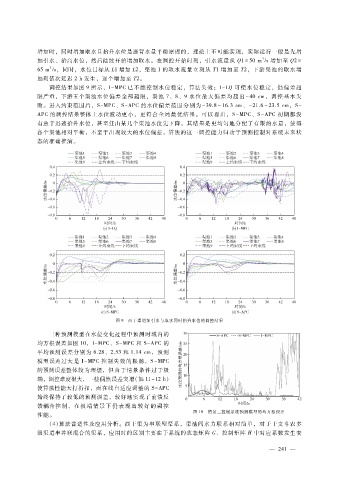
调控结果如图 9所示,I - MPC已不能控制水位稳定,算法失效;I - LQ可使水位稳定,但偏差超
限严重,下游五个渠池水位偏差全部超限,渠池 7、8、9水位最大偏差均超出 - 40cm ,调控基本失
败。进入约束范围后,S - MPC、S - APC的水位偏差范围分别为 - 39.8~16.3cm 、 - 21.6~23.5cm ,S -
APC的调控结果整体上水位波动更小,更符合全局最优结果。可以看出,S - MPC、S - APC初期都没
有急于迅速抬升水位,甚至任由某几个渠池水位先下降,其结果是更均匀地分配了有限的水量,使得
各个渠池相对平衡,不至于出现较大的水位偏差,算法的这一调控能力归功于预测控制对系统未来状
态的准确推演。
图 9 西干渠增加引水与取水同时抬升水位的调控结果
三种预测模型在水位变化过程中预测时域内的
均方根误差如图 10,I - MPC、S - MPC和 S - APC的
平均预测误差分别为 6.28、2.53和 1.14cm,预测
模型误差过大 是 I - MPC控制失效的根源,S - MPC
的预测误差整体较为理想,但由于情景条件过于极
端,调控难度很大,一些偶然误差突增(如 11~12h)
使算法性能大打折扣,而在线自适应调整的 S - APC
始终保持了较低的预测误差,较好地实现了前馈反
馈耦合控 制,在极 端 情景 下仍 表 现 出 较 好 的 调 控
图 10 情景二控制系统预测模型的均方根误差
性能。
( 4)算法普适性及应用分析。西干渠为串联型渠系,渠池间水力联系相对简单,对于干支斗农多
级渠道串并联混合的渠系,应用时的区别主要在于系统的状态矩阵 G、控制矩阵 H中对应系数发生变
— 2 4 1 —