
Page 116 - 2023年第54卷第2期
P. 116
平滑,且用时相对较短,但水位波动很大,有三处水位偏差超限,偏差范围 - 75.8~25.4cm。过大的
水位变幅既不利于工程安全,也会导致取水闸流量不稳定甚至供水困难。I - MPC水位变化过程与 I - LQ
类似,但水位调控超限更为严重,偏差范围 - 72.9~36.4cm ,主要原因是预测误差较大,干扰了当前
调控动作,导致算法效果较差。S - MPC成功将水位变幅控制在约束范围内,但代价是调控用时更长,
SID模型相对准确地预测到了取水增加所带来的水位降低趋势,类似地,S - APC也将水位控制在较小
的变幅内,初期寻找最优参数时水位有一些小幅震荡,后水位变化逐渐平滑,水位的整体偏差较 S - MPC
更小。
图 7 西干渠增加引水与取水时水位调控结果
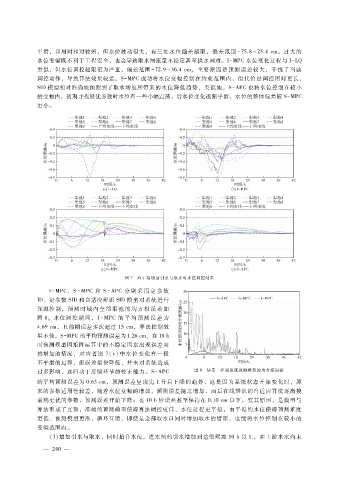
I - MPC、S - MPC和 S - APC分 别 采 用 定 参 数
ID、定参数 SID和自适应辨识 SID模型对系统进行
预测控制,预 测时 域 内全 部渠 池 的 均 方 根 误 差 如
图 8。水位调 控 期 间,I - MPC的 平 均 预 测 误 差 为
4.69cm,且前期误差多次超过 15cm,算法控制效
果不佳。S - MPC的平均预测误差为 1.26cm,在 18h
时预测模型因矩阵运算中的不稳定因素出现误差突
然增加的情况,对应着图 7(c)中水位变化有一段
不平滑的过程,但误差很快降低,并未对系统造成
过多影响,这归功于反馈环节的校正能力。S - APC 图 8 情景一控制系统预测模型的均方根误差
的平均预测误差为 0.63cm,预测误差呈现先上升后下降的趋势,这是因为系统状态开始变化时,原
来的参数适用性较差,随着水位变幅的增加,预测误差随之增加,而后在线辨识的自适应算法逐渐搜
索到更优的参数,预测误差开始下降;在 10h后误差甚至保持在 0.10cm以下,究其原因,是模型与
算法形成了互馈,准确的预测模型使得算法调控更佳、水位过程更平稳,而平稳的水位使得预测难度
更低、预测模型更准,循环互馈,即使是全部取水口同时增加取水的情形,也能将水位控制在较小的
变幅范围内。
( 3)增加引水与取水,同时抬升水位。进水闸的引水增加到达渠尾需 10h以上,在上游来水尚未
— 2 4 —
0